Features
|
|
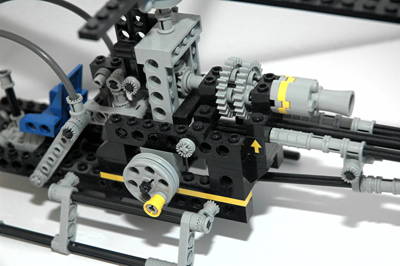
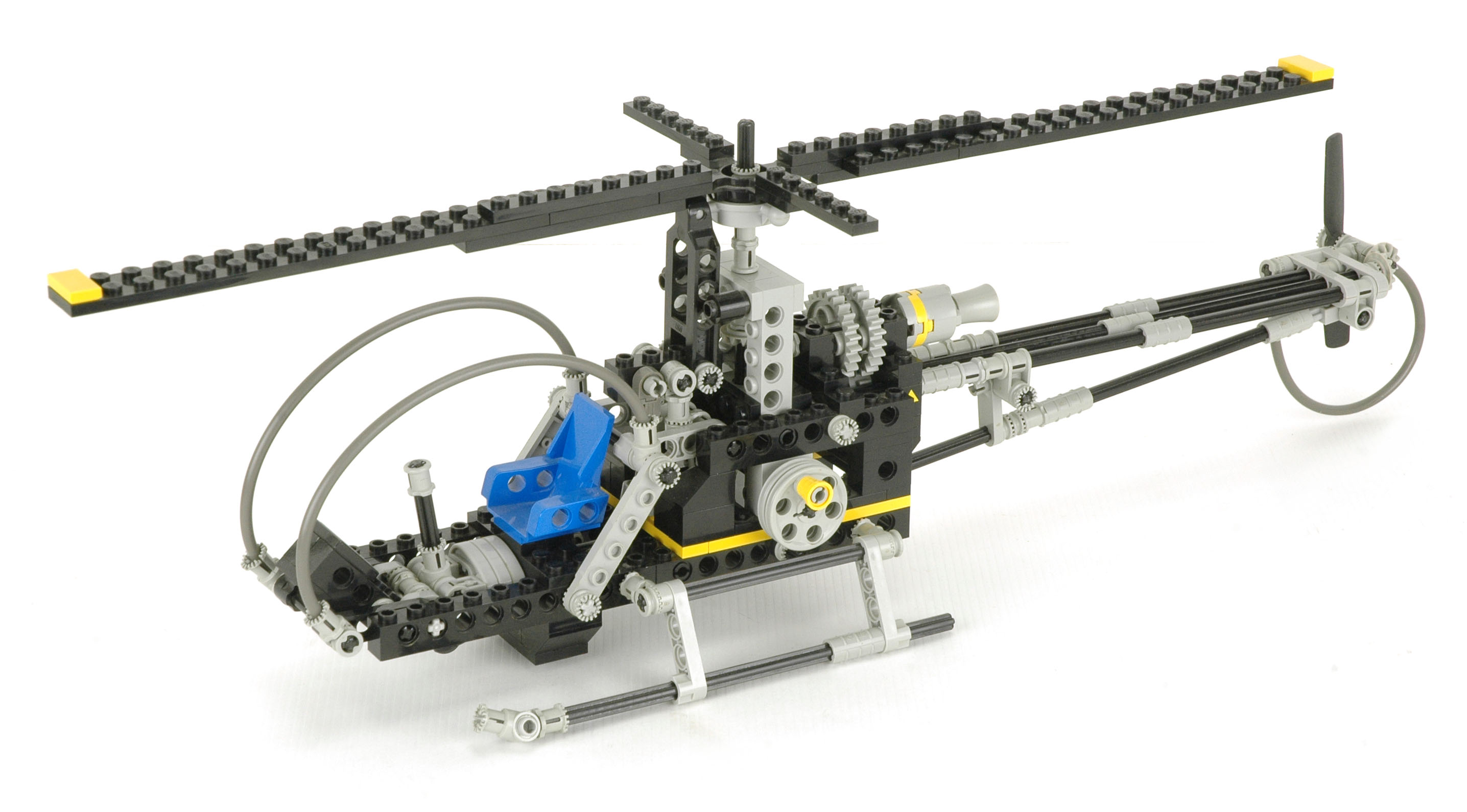
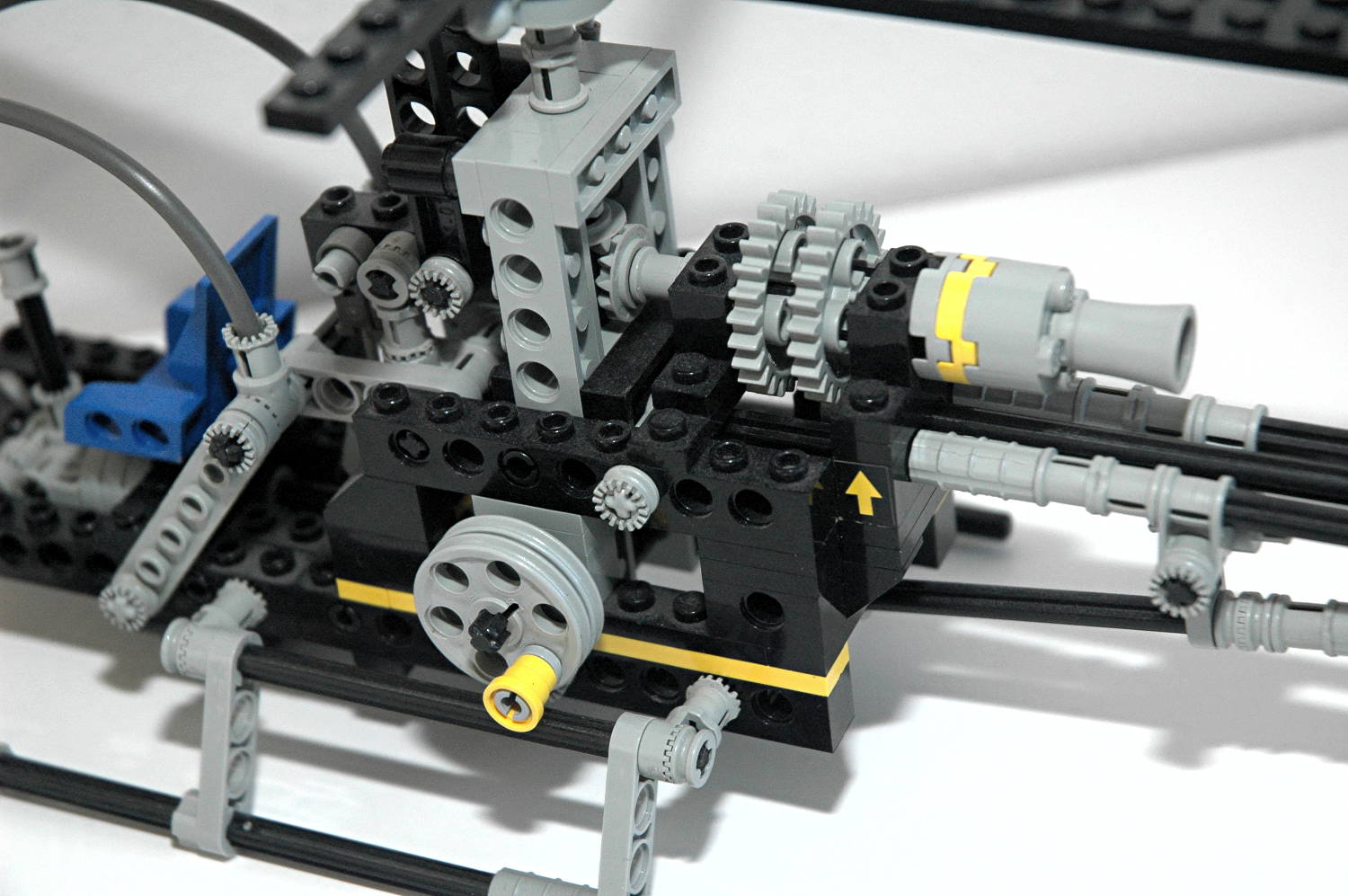
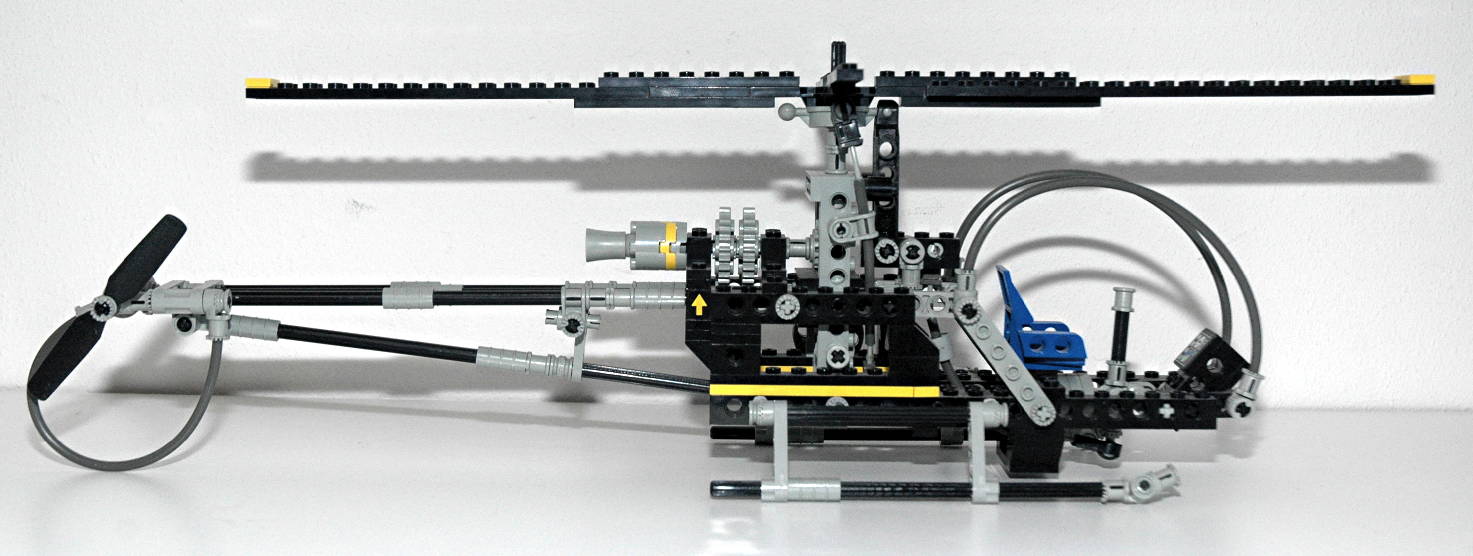
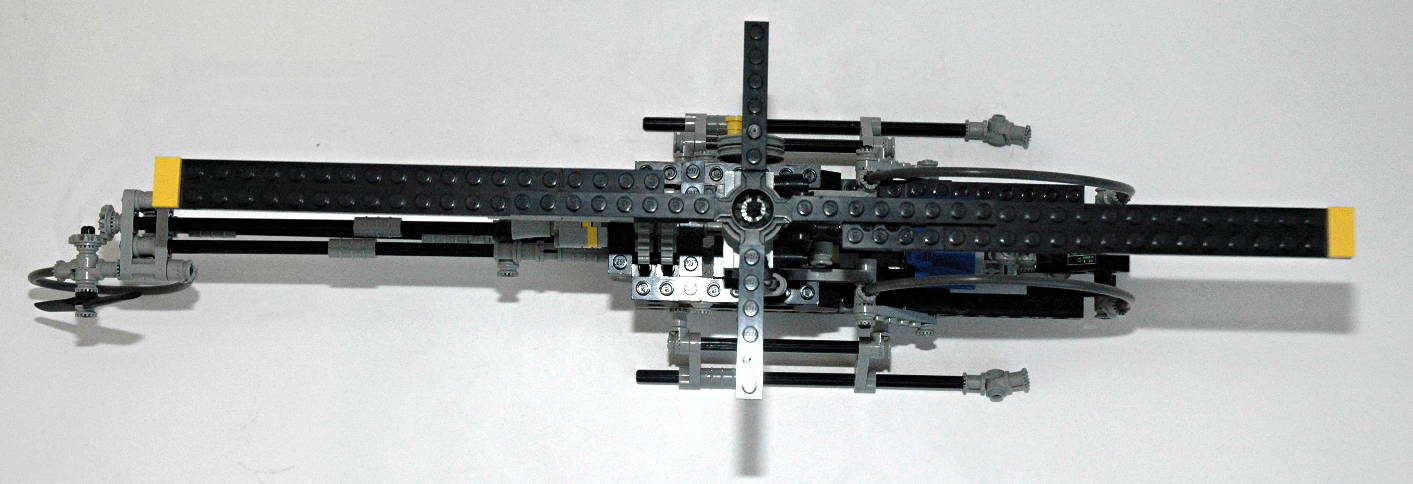
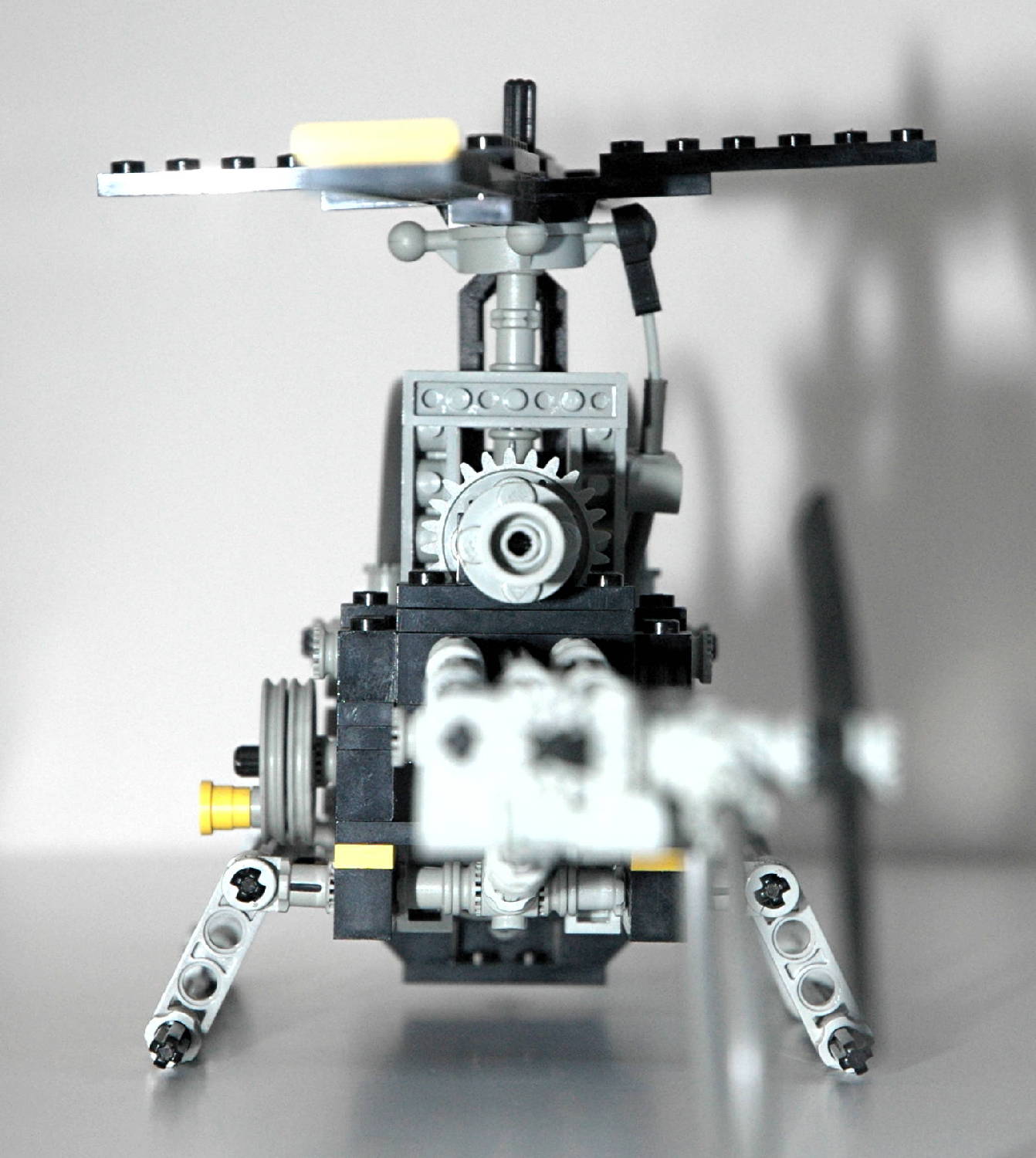
Rotors
The rotors' rotation is driven by an input crank on the left
side. This crank drives a set of 12 tooth bevel gears giving the
main
rotor a ratio of 1:1. The main rotor axle also drives another set
of bevel gears which rotate a simulated turbine engine. One of
the turbines, a 24 tooth spur gear, meshes with an 8 tooth gear running
to the tail rotor resulting in a 3:1 ratio. A final pair of bevel
gears complete the path to the tail rotor.
The input crank uses a rare handle part to make rotation easier.
|

Click for an animation of the
rotors
in
motion.
|
|
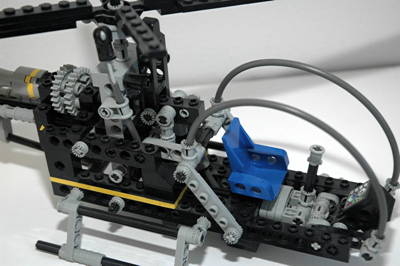
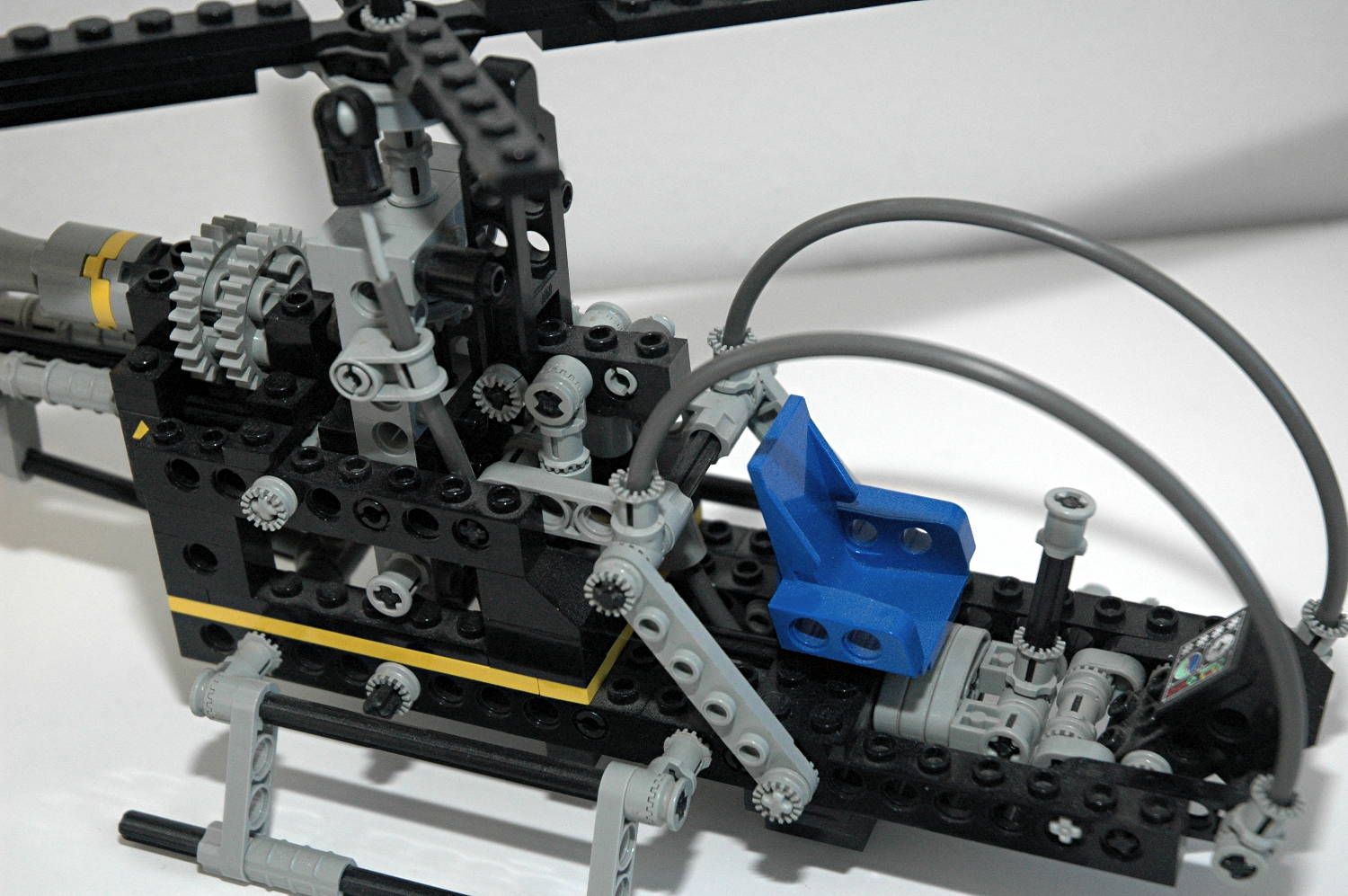
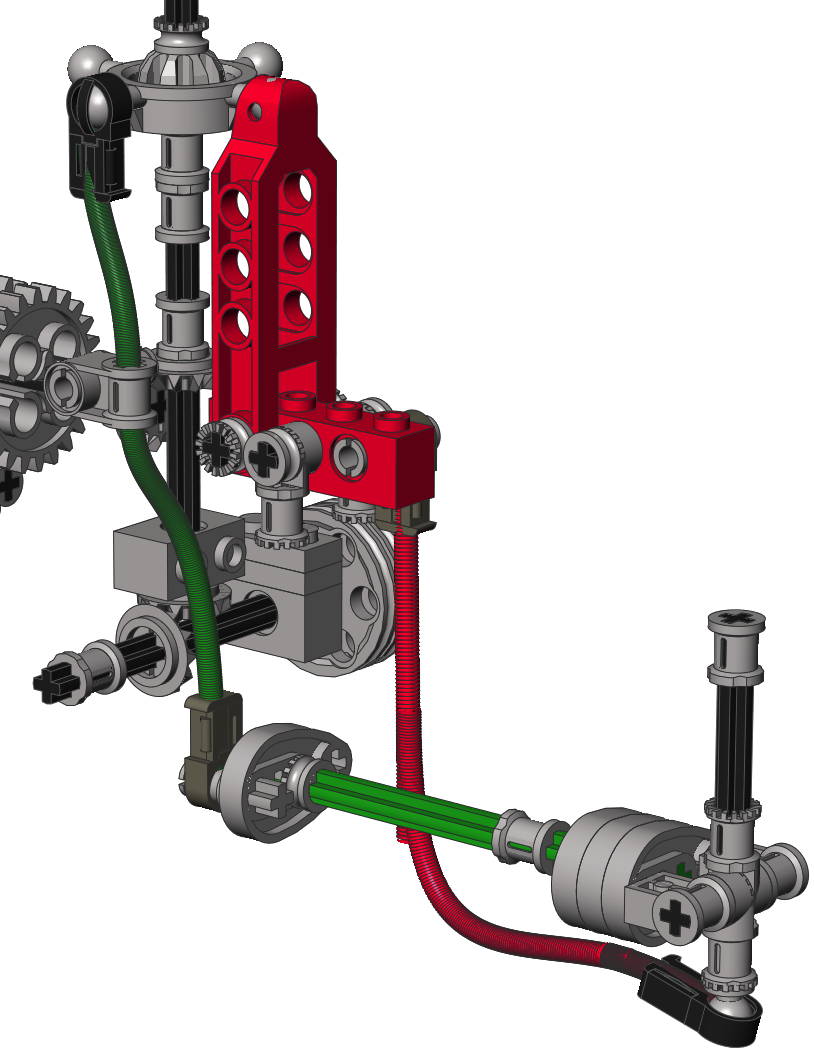
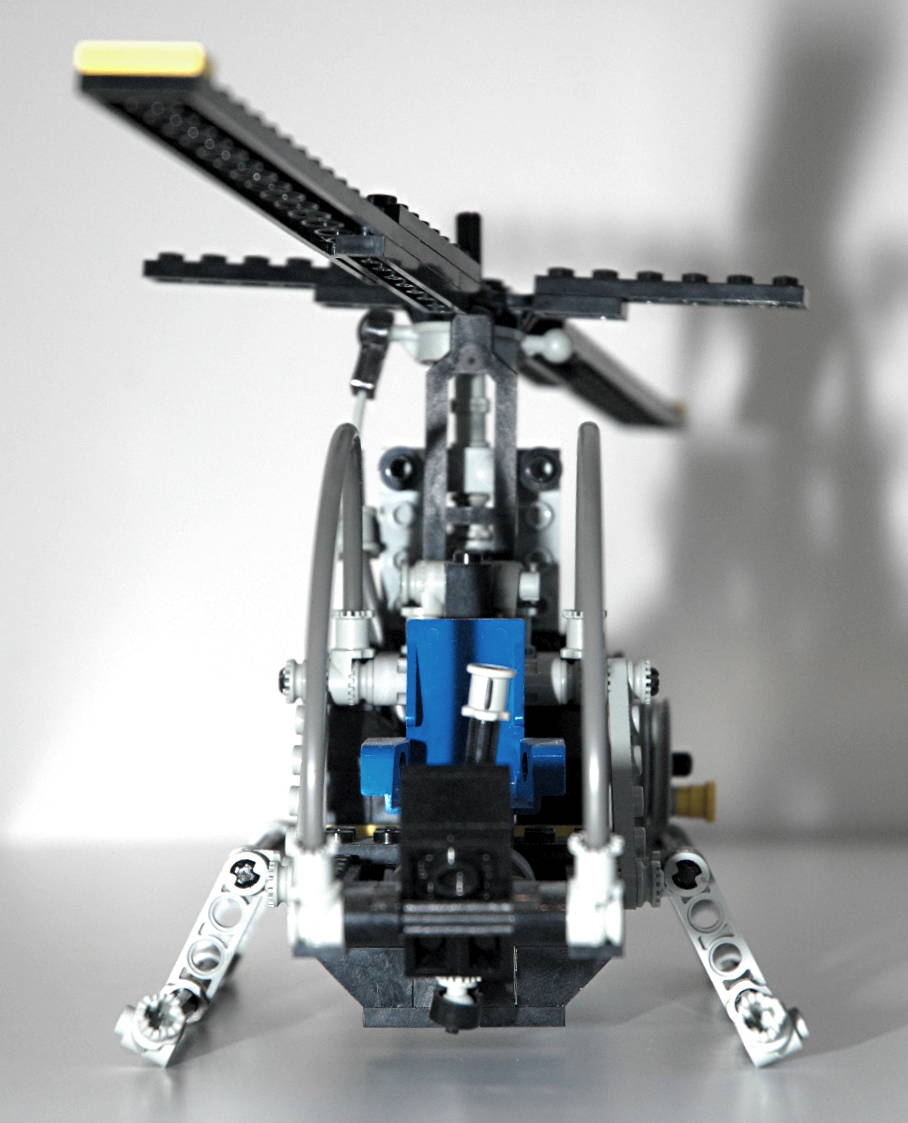
Cyclic Pitch
This helicopter uses a cyclic pitch system very similar to 8856. Real helicopter cyclic works by
changing the pitch of individual blades
as they rotate using a swashplate. For example, the leading and
trailing blades may be at 10 degrees of pitch, while the port and
starboard blades are at 5 and 15 degrees respectively. This model
pivots the entire rotor head instead. If a real helicopter did
this it would risk striking the rotor against the frame.
The rotor axle drives a spherical ball gear. A part with 4
ball joints which is similar to a swashplate connects to a pair of flex
cables to allow the head to pivot on two axes. The ball joints
also keep the swashplate from rotating. Inside the swashplate is
a four blade rotor part. The rotor has tabs on the inside which
mate with the ball gear to transmit torque. Because of the
shape of the gear, the rotor can pivot on two axes while still rotating.
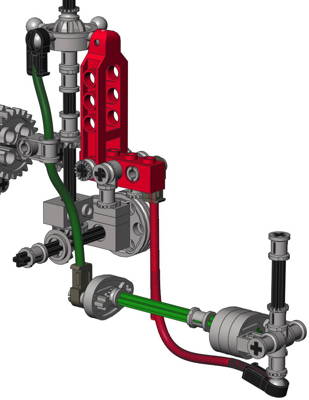
The control of the cyclic is from a stick at the pilot's
position. There is one flex cable and sleeve for each axis.
Fore-aft motion of the stick (shown in red) pushes and pulls the cable
using a ball
joint. The flex cable runs up to a link which lifts the
swashplate using a suspension control arm! Lateral motion of the
stick rotates an axle which runs aft (shown in green). At the end
of the axle is a
ball joint and a cam which connects to another flex cable. This
flex cable
attaches to a ball joint on the side of the swashplate.
|

Click for an
animation of the cyclic
in motion. |
|
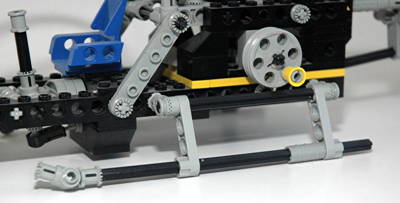
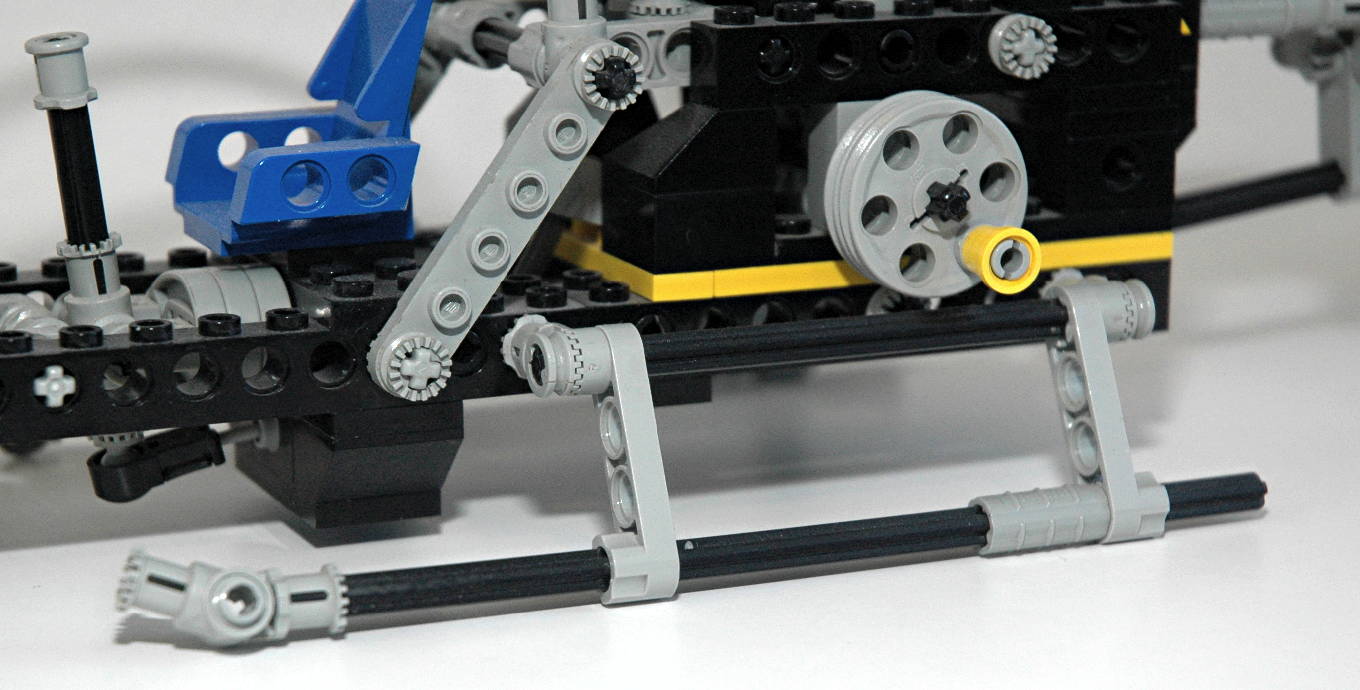
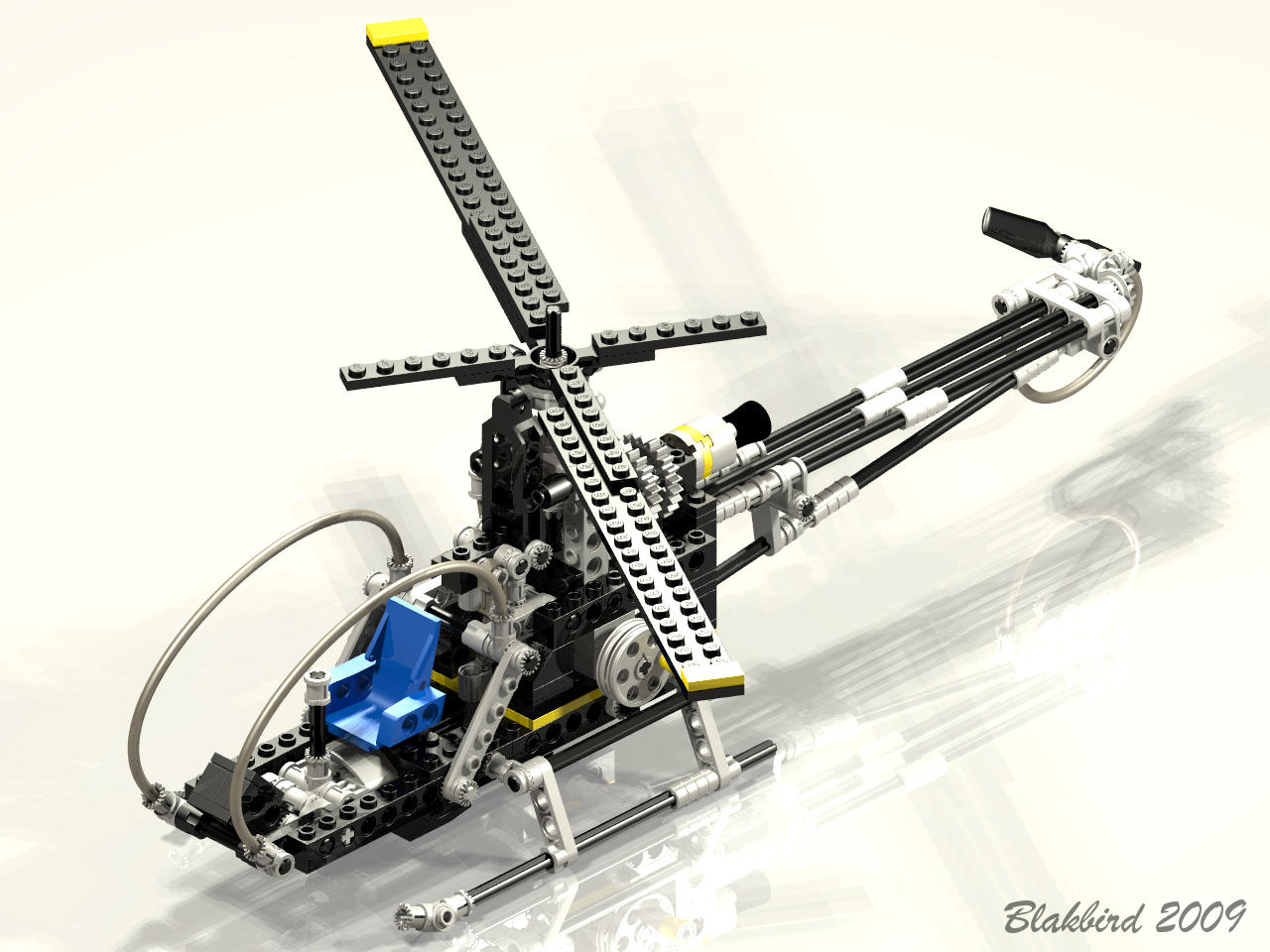
Skids
The landing skids are quite sturdy and are constructed from toothed
connectors, liftarms, and axles.
|
|

{kind=link}
{kind=link}