|
Transformation
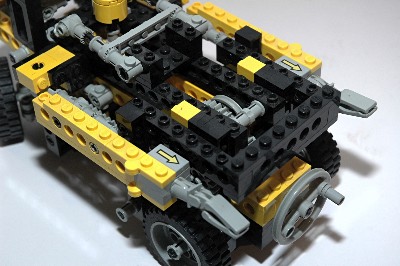
The transformation from truck to robot is controlled by a crank in the
rear of the vehicle. First the arms must be disengaged from the
axle pins which hold them in place. The arms pivot via connectors
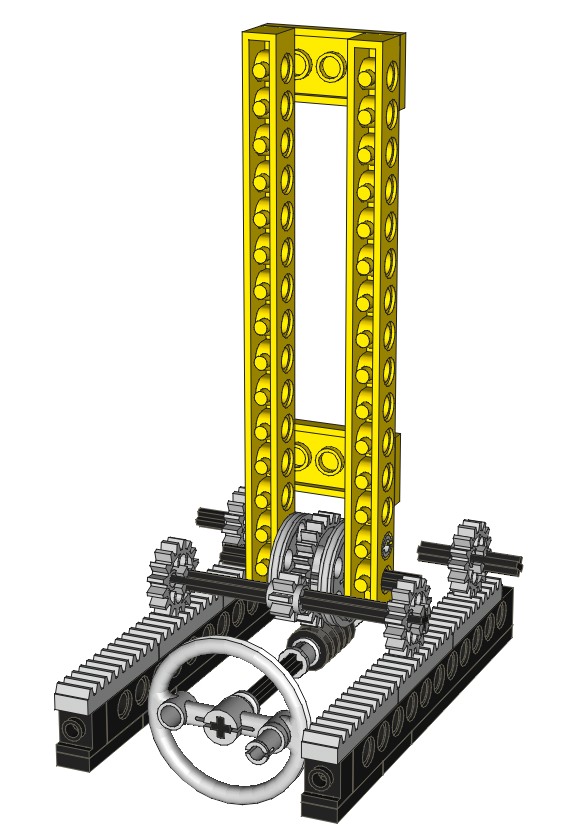
and pins at the shoulder. Then the crank is turned. The
crank drives a worm gear which mates with a 24 tooth spur gear.
Beside the spur gear are two pulley wheels with 1/2 pins attached to
adjacent beams which form the torso of the robot. As the pulleys
rotate, the torso pivots upward. The torso and the head form a 4
bar linkage, so the head stays parallel to the ground as it rises.
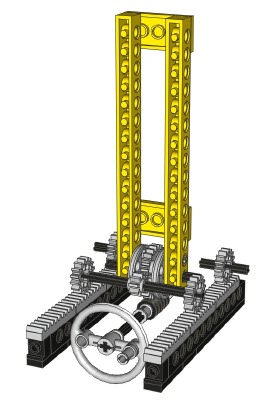
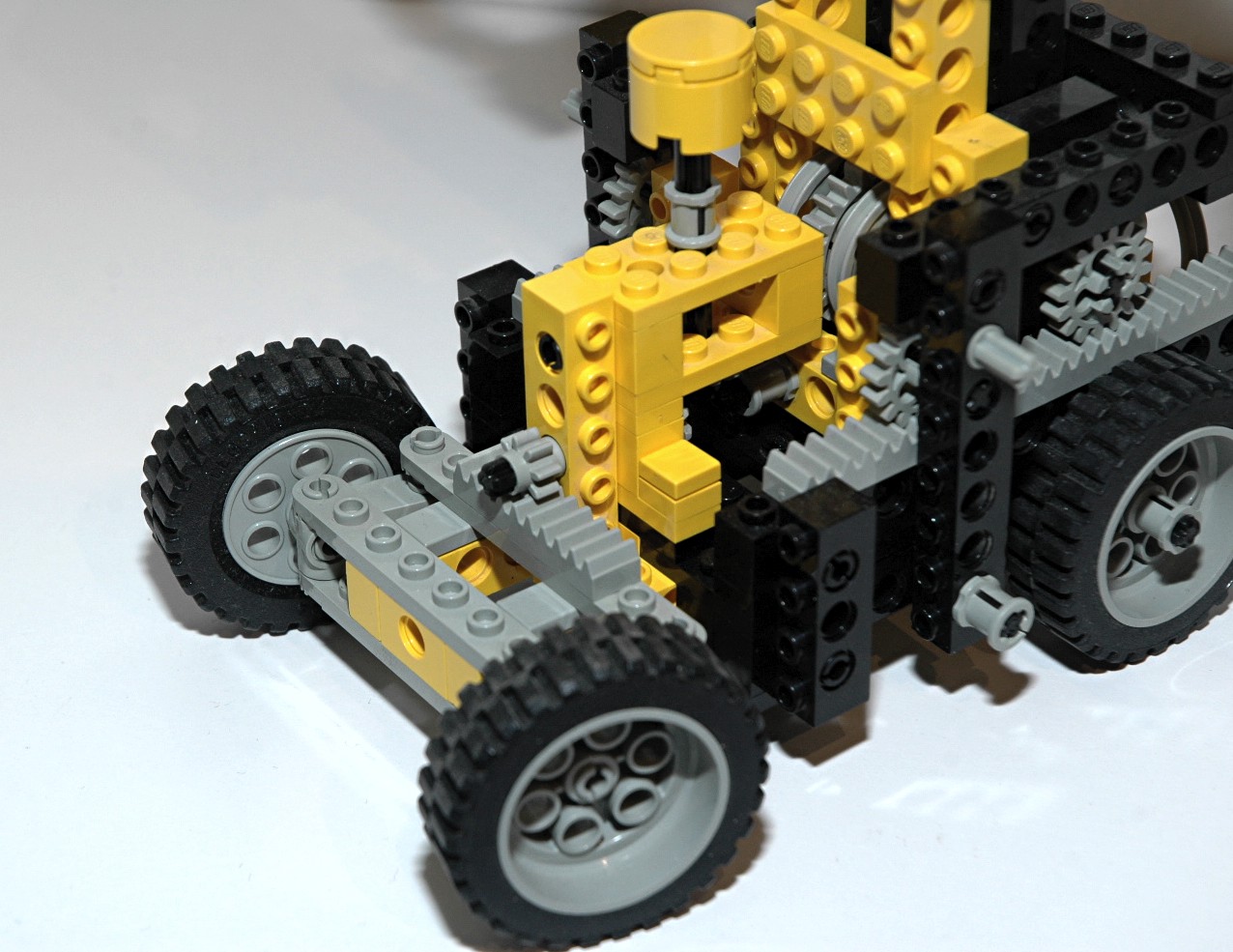
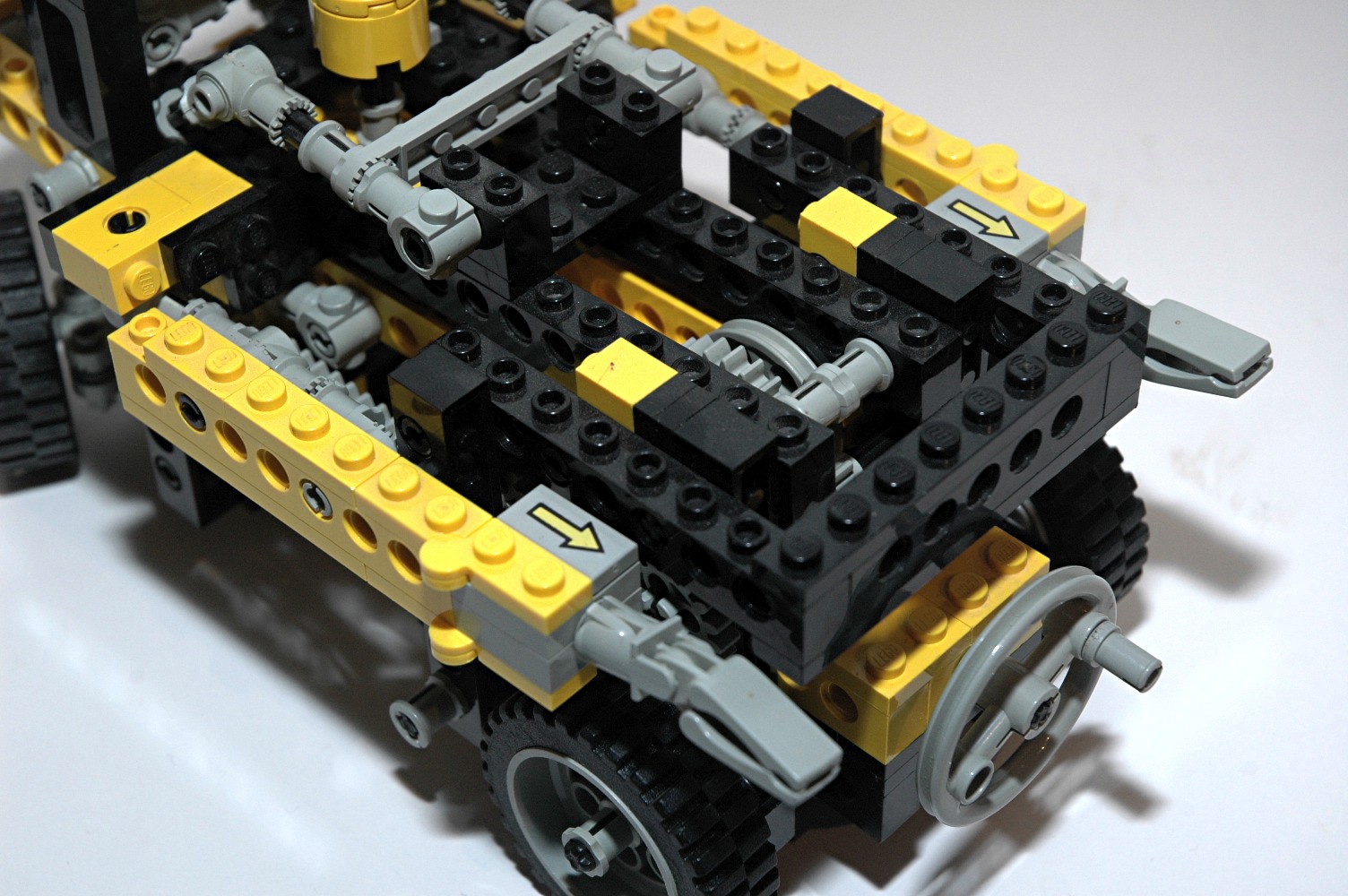
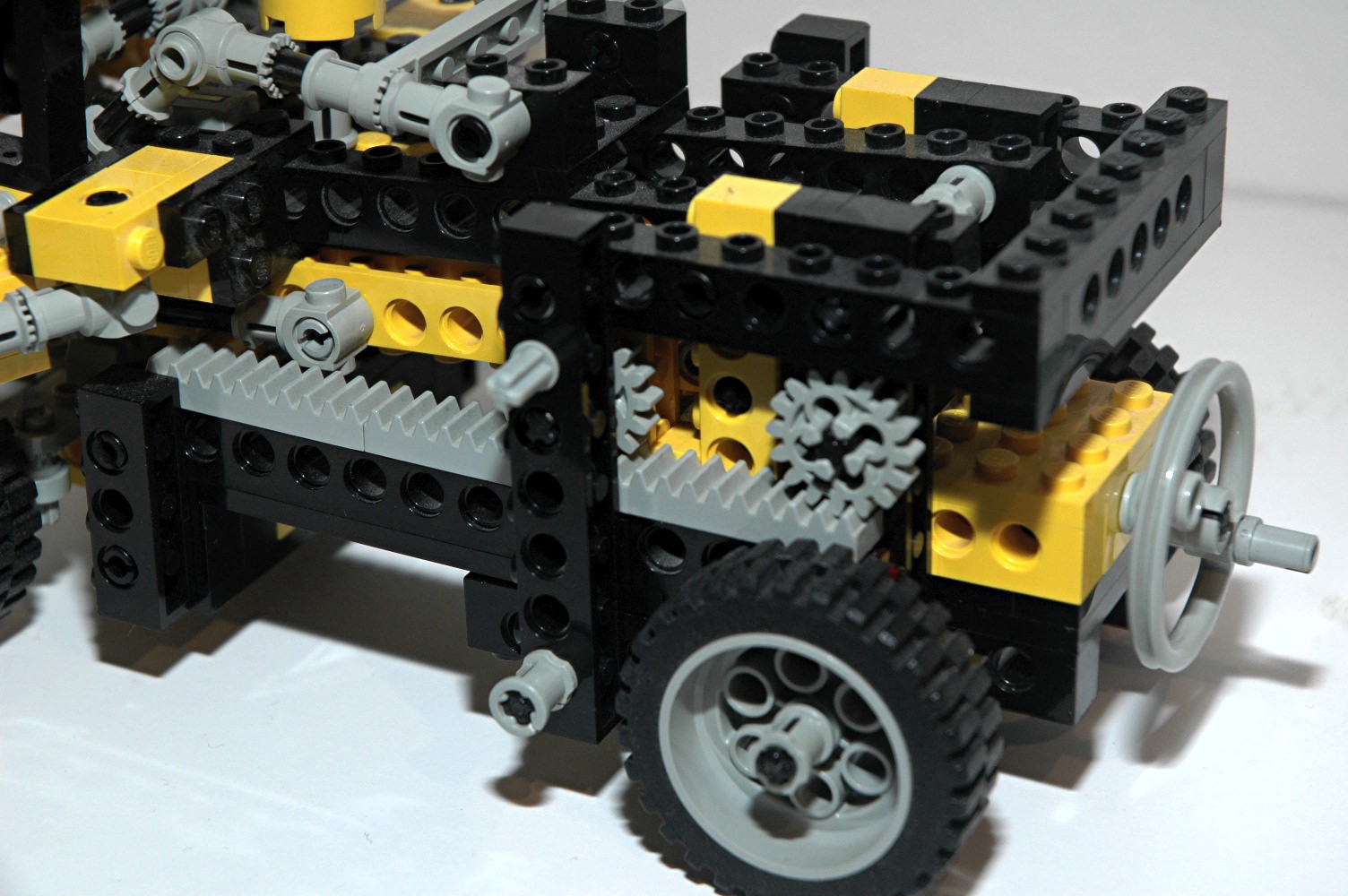
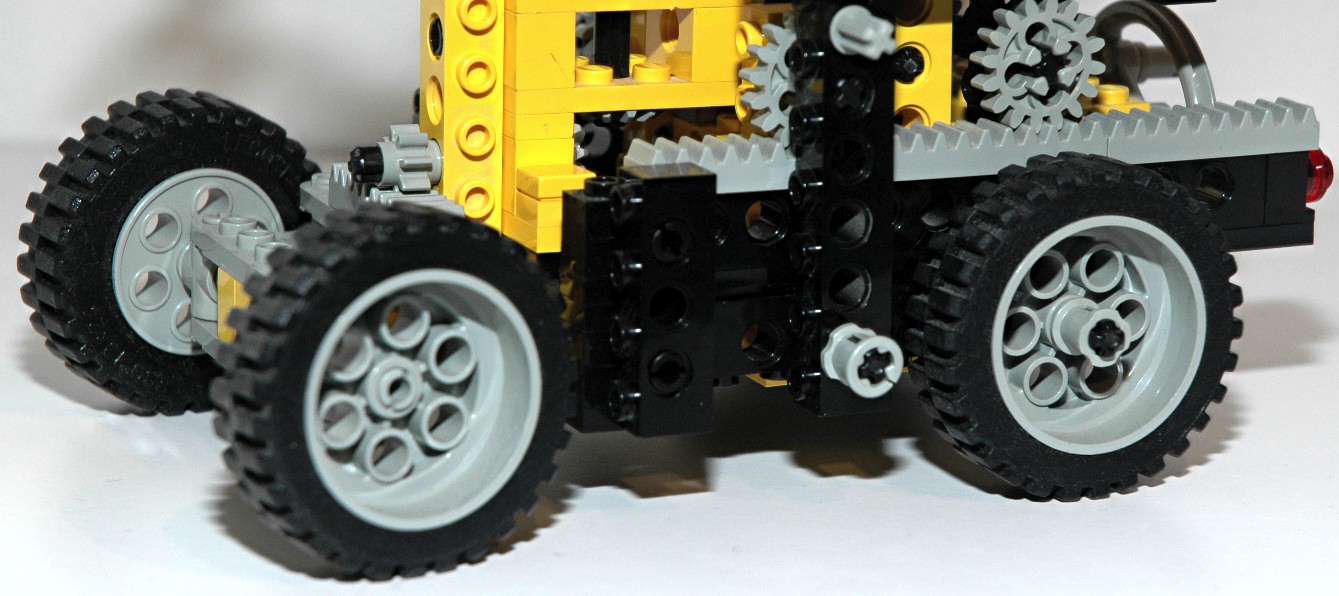
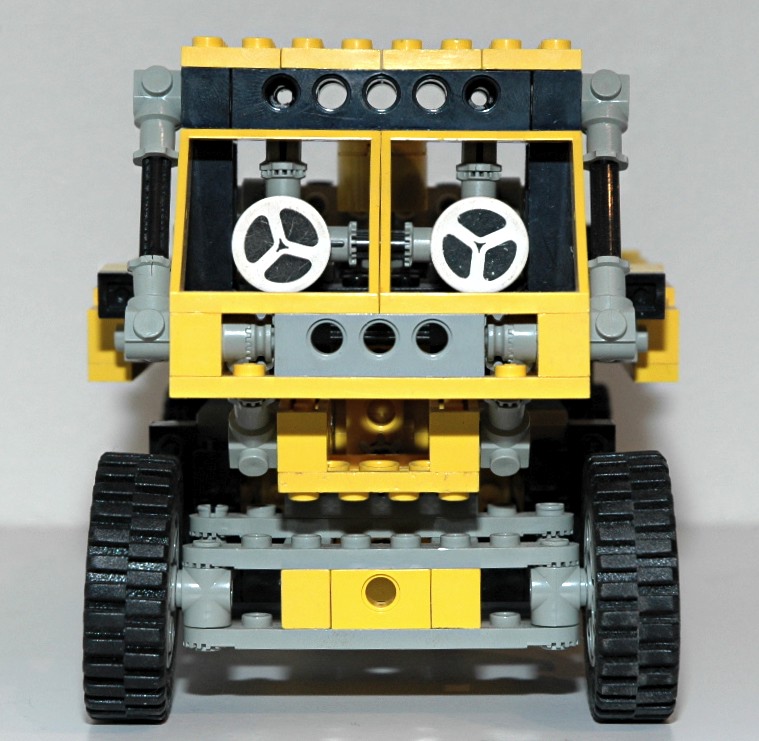
The same 24 tooth gear which drives the torso also drives an 8 tooth
pinion in parallel. This axle has another pinion (16 tooth) on
each end which mates with gear racks on either side of the
chassis. As the racks translate, the entire wheelbase constricts
and shortens.
A second set of pinion gears mates with the racks but is not
driven. The function of this second set is to keep the racks
level.
Once the robot is upright, the shoulder connector joints can be rotated
into place. The elbows are hinges, and the hands are claw pieces.
The use of a worm gear results in a system which cannot be backdriven
(because the axial friction is higher than the
backdriving torque due to the screw pitch angle) which allows the robot
to be supported in transit so that it does not fall under its own
weight.
|


Click for an animation of the
transformation
in motion.
|







{kind=link}
{kind=link}